Craft Box,Diy Craft Box,Craft Storage Box,Craft Organizer Box NINGBO ART TALK CRAFTS CO LTD , https://www.just-arts-crafts.com
1. Temperature compensation scheme In traditional temperature compensation, for example: hardware compensation and software compensation. However, there are disadvantages such as compensation circuit drift, local optimum, and insufficient accuracy, which cannot meet the SAW pressure sensor compensation requirements. In view of this situation, this paper uses neural fuzzy control method to intelligent temperature compensation for SAW pressure sensor.
Neuro-fuzzy control is a method of fuzzy control implemented using neural networks. In the formal structure is a fuzzy mapping implemented with multi-point networks. The nonlinearity and trainability of the neural network indicate that it can implement any kind of mapping relationship. Therefore, this paper uses neural network to express the mechanism of knowledge, through learning and training, to realize the control rule base, so as to realize the mapping of fuzzy input and fuzzy output. Neuro-fuzzy control The SAW pressure sensor temperature-pressure compensation model is shown in Figure 1. 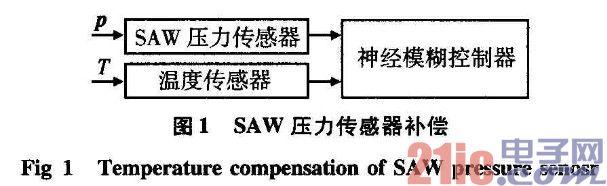
After the SAW pressure sensor is connected with a neural fuzzy controller and the sensing temperature T is taken as an input, the neurofuzzy controller can directly output the measured value.
2. Neural networks that implement control rules Under normal circumstances, the fuzzy control inference function is performed under the condition that membership functions are unchanged. In actual use, it changes with time. In order to make up for the inadequacy of a single fuzzy control technique, the learning function of a neural network is used to adjust the degree of membership and realize an automatic adjustment function to meet actual needs. This paper uses a three-layer feed-forward neural network with a hidden layer. The model is shown in Figure 2. 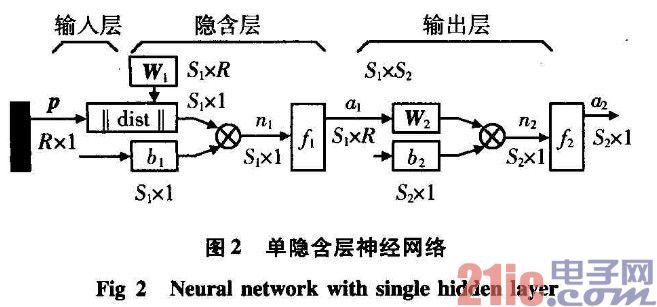
Where p is the input vector, R is the dimension of the input vector, S1 is the number of neurons in the hidden layer, S2 is the number of neurons in the output layer, W1 is the weight matrix of the neurons in the hidden layer, and W2 is the weight of the output layer In the matrix, b1 is the hidden neuron threshold, b2 is the hidden layer neuron threshold, n1 is the hidden layer input node, and n2 is the output layer node. F1 is an s-function and f2 is a purein-type function. Neural network algorithms are learning algorithms for feedforward multi-layer networks. If the output doesn't get the desired output, it goes backwards. The weight coefficient between layers is adjusted by backward propagation of the error. The sample sequence is repeatedly input until the weight coefficient is not changed, and the output error is within the specified range. The algorithm uses the following improvements: 1) Simulated annealing is used to overcome the local minimum; 2) The singularity function is used as the excitation function and the new error propagation factor is used in the propagation to improve the convergence of the algorithm.
In view of the fact that the BP neural network training process needs to modify the ownership value and the threshold, it is a global approach neural network, but the training speed is slow and it is not suitable for occasions with strong real-time performance. Therefore, a local approximation network-radial basis network is adopted. . The algorithm training relation is as follows:
The node output is ![]()
Where a1 is the node output; b is the neuron threshold; Wij is the contact connection weight; f is the transfer function.
Weight correction ![]()
Where z is the new learning factor; h is the momentum factor; Ej is the calculation error.
Error calculation ![]()
Where tPI is the expected output value of the i node; aPI is the calculated output value of the i node.
Due to the uncertainty of the number of neurons in the neural network, we have selected 2 neurons in the input layer and 4 neurons in the hidden layer after extensive data validation. The output layer has only 1 neuron. A three-layer network with only one hidden layer is used to learn and control the control base. Each control rule is trained as a sample of a neural network, so that this rule-based neural network weight coefficient can be realized.
Because of the insufficiency of reasoning in the neural network, the powerful inference function of fuzzy control can be used to extract valid conditional sentences and accelerate the training speed of the network. Select the deviation E and the deviation change rate ΔE as the input and the control quantity U as the output. The deviations of the deviation E and deviation change rate △E are large (L), medium (M), and small (S), respectively. 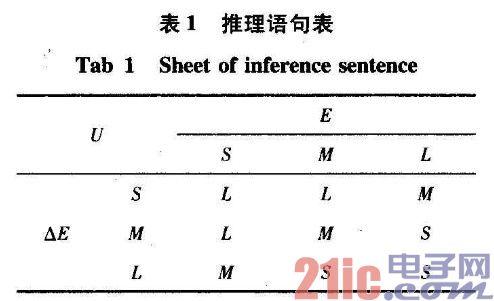
The row element indicates the blur amount of E, and the vertical row indicates the amount of blur of ΔE, and the two intersect each other as the blur amount of the control amount U. According to the data in the table, it can be seen that there are 3×3 kinds of inference sentences, and the reasoning method is used to simplify the conditional statement table to the following 4 statements: 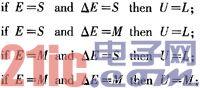
Contribute to the selected statement, the possible number is 20,21,...,2n. In this way, redundant reasoning statements are reduced, which is conducive to the rapid progress of network training.
3. Simulation and Application Nowadays accidents frequently occur in underground mines. Using AE acoustic emission to predict gas bursts is a trend of non-contact measurement. Due to environmental conditions, using SAW pressure sensors as sensors for receiving acoustic emission signals, it is necessary to ensure the measurement signals. High accuracy and intelligence features, and intelligent compensation of temperature with neuro-fuzzy control, coupled with advanced packaging technology, can make SAW play a significant role in actual gas prediction and measurement. Through experimental verification, this method is feasible. The training and simulation of neural network is performed in MATLAB6.0 environment. Through the neural network toolbox, the corresponding simulation training program is compiled to realize the simulation process. In the simulation, several sets of frequency-temperature are randomly selected as input, and finally, the comparison between the calibration pressure value and the simulation result is performed. Simulation data results are shown in Table 2. 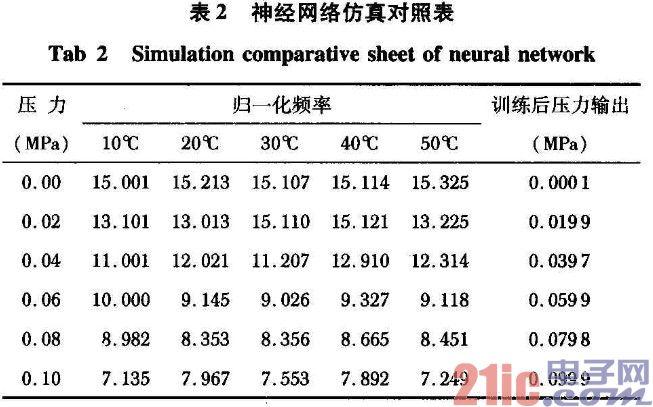
In practice, the influence of temperature change on the performance of SAW pressure sensor is very obvious. Through the training of neural network, the training frequency and error are within the specified range, and the maximum error is only 1%. The simulation results of BP algorithm are in good agreement with the actual measurement values.
4. Conclusions This paper proposes to use neural blisters control technology to effectively compensate the temperature of the SAW pressure sensor, so that the SAW pressure sensor can more accurately measure the pressure of the measured object in practical applications, and the neural network constitutes the controller. Information processing adopts approximate reasoning of fuzzy quantity, combines neural network technology and modular control technology to realize intelligent temperature compensation of SAW pressure sensor, and lays a foundation for practical application of SAW pressure sensor.
Introduction SAW (Surface Acoustic Wave) technology is one of the most popular research topics. There have been reports of sensors such as temperature, pressure, and acceleration at home and abroad. SAW pressure sensors rely on its unparalleled performance, such as: 1) digital number output; 2) high sensitivity, high resolution, strong anti-interference ability; 3) easy to integrate on a large scale. It is because of its own superiority that it has a wide range of applications. But the fly in the ointment is that SAW pressure sensors are more demanding on the environment, SAW oscillator output frequency signal changes with the external factors such as pressure, temperature, magnetic field and other changes, in particular, the influence of temperature is the main source of measurement error, in order to ensure the SAW pressure Sensors with high accuracy and high sensitivity must be effectively temperature compensated. In this paper, neural network and fuzzy control technology are combined to intelligent temperature compensation for SAW pressure sensor. Through this method, the SAW pressure sensor can be better applied to the engineering field.